
The
Robot Performance and Safety Test center and test setups for tacile robot
performance being explained by Robin Kirschner. Credit: TUM-MIRMI, Dayana
Ramirez.
Over
the past decades, roboticists have introduced a wide range of systems with
distinct body structures and varying capabilities. As the number of developed
robots continuously grows, being able to easily learn about these many systems,
their unique characteristics, differences and performance on specific tasks
could prove highly valuable.
Researchers at Technical University of
Munich (TUM) recently created the "Tree of Robots," a new
encyclopedia that could make learning about existing robotic systems and comparing them significantly easier. Their
robot encyclopedia, introduced in a paper published in Nature
Machine Intelligence, categorizes robots based on their performance fitness
on various tasks.
"The aspiration for intelligent robots that can understand their environment as we
humans do, and execute tasks independently, has existed for ages," Robin
Jeanne Kirschner, first author of the paper, told Tech Xplore.
"The active development of tactile robots—robots capable of understanding their surroundings through the sensation of touch—began approximately 20 years ago. This journey started with the creation of lightweight systems equipped with torque sensors in every joint. Since then, we have witnessed improved technology, better controllers, and new reaction schemes, which have enabled the development of systems proficient in executing tasks and perceiving the environment through touch."
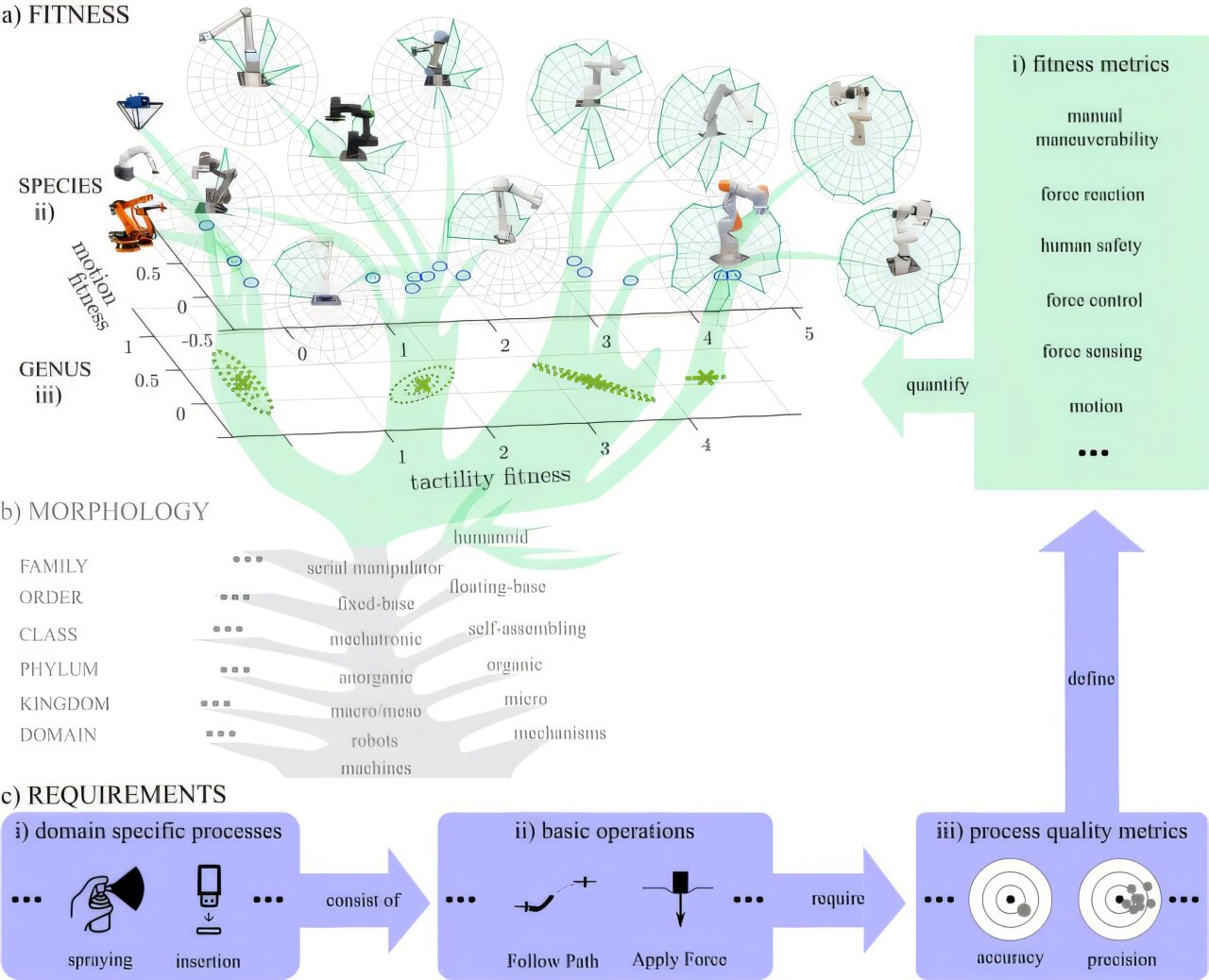
Core idea and concept of the tree of robots
addressed in the study. Credit: Nature Machine Intelligence (2025).
DOI: 10.1038/s42256-025-00995-y
Most standards and approaches for
classifying robots introduced to date do not account for the ability of systems
to adapt to their surroundings and successfully interact with nearby objects by
touching them. This crucial capability influences both the safety of robots and
their performance on specific tasks, spanning various real-world applications.
"The focus of system
classification remains separated based on, e.g., individual mechanical
properties, new controller features, and certifications remains based solely on
the mechanical structure of sensing systems instead of their actual performance,"
said Kirschner. "This narrow approach often overlooks the interplay of
components and the core purpose of a robotic device: to assist in executing
tasks, which demands specific capabilities."
To overcome the limitations of
existing robot classification methods, Kirschner and her colleagues started
testing various existing systems, focusing on features that influence their
safety, such as their ability to detect contact with other objects. Concurrently,
they also conducted an in-depth analysis of robotics tasks, deriving multiple
metrics that indicate the capabilities of robots beyond safety, for instance,
impacting their ability to successfully execute tactile tasks and comfortably
interact with humans.
"By testing multiple robot manipulators, we were then able to derive all these metrics and show that the tactility fitness of these systems significantly varies, calling for a proper classification and encyclopedia—the Tree of Robots," said Kirschner.
The
tree of robots concept and first established grouping for industrial fixed
based manipulators. Credit: Kirschner et al. (Nature Machine Intelligence,
2025).
"As
a result, we established the AI Robot Performance and Safety Center—a dedicated
laboratory equipped with advanced measurement devices to evaluate robot
performance. With these resources, we aim to further grow the 'Tree of Robot,'
an essential encyclopedia for the field of robotics."
The Tree of Robots encyclopedia is meant
to be continuously updated over time, ultimately serving as a Wikipedia-like
platform that contains information about robots and their capabilities. It
includes a wide pool of information ranging from the robots' fundamental body
structures to the motors and/or sensors they rely on and their resulting
capabilities, specifically the sensitivity and reliability of their physical
interactions (i.e., tactility fitness) and precision of their movements (i.e.,
motion fitness).
"While we began with analyzing and
classifying existing stationary manipulators using fitness metrics we defined
specifically based on for industrial applications, the encyclopedia must grow to encompass other
robotic systems for service tasks, such as humanoids or mobile robots,"
explained Kirschner. "Its purpose is to efficiently guide both hardware
and software development in robotics."
In contrast with many previously devised robot categorization approaches, the Tree of Robots encyclopedia clearly outlines the specialized capabilities of different robots. In addition, it groups robots into three main groups based on their tactility fitness, which indicates the extent to which they are suitable for completing specific tasks.

Metric test setups. Credit: Nature Machine Intelligence (2025). DOI: 10.1038/s42256-025-00995-y
"This
fundamental insight should be integrated into application design,
standardization efforts, and future robotics development," said Kirschner.
"By aligning hardware and software components to achieve optimal
performance for a given process—rather than designing processes to fit the
system's constraints—we can advance robotics to new levels of efficiency and
effectiveness."
The new encyclopedia developed by
Kirschner and her colleagues could inform future research, for instance, by
helping other computer scientists and roboticists to identify the best systems
to test their algorithms. Meanwhile, the researchers plan to continue adding
information to the Tree of Robots, including other robotic systems and other
relevant metrics.
"We are now expanding our work in several directions," added Kirschner. "My focus is on linking these critical findings to ensure human safety in collaborations, emphasizing a robot's tactile capabilities. The goal is to achieve certifiably safe applications with tactile robotic systems. Alongside other teams, we are also exploring how to extend the tree of robots in other areas, such as systems designed for service and care tasks and including, e.g., humanoid systems."
by Ingrid Fadelli , Tech Xplore
Source: An evolving robotics encyclopedia characterizes robots based on their performance
No comments:
Post a Comment