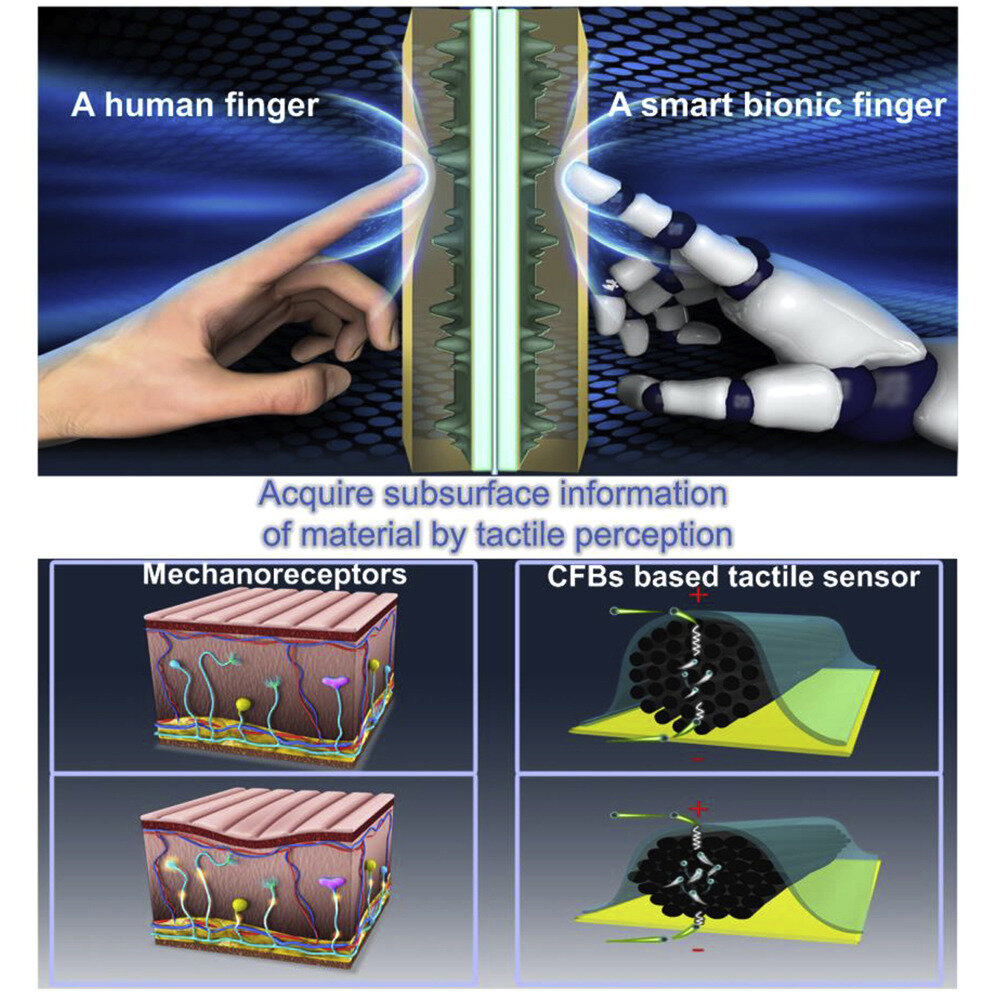
Graphical abstract. Credit: Cell Reports Physical Science (2023). DOI: 10.1016/j.xcrp.2023.101257
What
if, instead of using X-rays or ultrasound, we could use touch to image the
insides of human bodies and electronic devices? In a study published in the
journal Cell Reports Physical Science on
February 15, researchers present a bionic finger that can create 3D maps of the
internal shapes and textures of complex objects by touching their exterior
surface.
"We were inspired by human fingers,
which have the most sensitive tactile perception that we know of," says
senior author Jianyi Luo, a professor at Wuyi University. "For example,
when we touch our own bodies with our fingers, we can sense not only the texture of our skin, but
also the outline of the bone beneath it."
"Our bionic finger goes beyond
previous artificial sensors that were only capable of recognizing and
discriminating between external shapes, surface textures, and hardness,"
says co-author Zhiming Chen, a lecturer at Wuyi University.
The bionic finger "scans" an object by moving across it and applying pressure—think of a constant stream of pokes or prods. With each poke, the carbon fibers compress, and the degree to which they compress provides information about the relative stiffness or softness of the object. Depending on the object's material, it might also compress when poked by the bionic finger: rigid objects hold their shape, while soft objects will deform when enough pressure is applied. This information, along with the location at which it was recorded, is relayed to a personal computer and displayed onscreen as a 3D map.
A. A video
of a bionic finger imaging a rigid letter A coated in soft silicone. B. A video
of a bionic finger imaging simulated human tissue. C. A video of a bionic
finger imaging an encapsulated electronic circuit. Credit: Li et al.
The researchers tested the bionic finger's ability to map out the internal
and external features of complex objects made of multiple types of material,
such as a rigid "letter A" buried under a layer of soft silicon, as
well as more abstractly shaped objects. When they used it to scan a small
compound object made of three different materials—a rigid internal material, a
soft internal material, and a soft outer coating—the bionic finger was able to
discriminate between not only the soft outer coating and the internal hard
ridges, but it could also tell the difference between the soft outer coating
and the soft material that filled the internal grooves.
Next, the researchers tested the finger's ability to sense and image
simulated human tissue. They created this
tissue—consisting of a skeletal component, made of three layers of hard
polymer, and a soft silicone "muscle" layer—using 3D printing. The
bionic finger was able to reproduce a 3D profile of the tissue's structure and
locate a simulated blood vessel beneath the muscle layer.
The team also explored the bionic finger's ability to diagnose issues
in electronic devices without opening
them up. By scanning the surface of a defective electronic device with the
bionic finger, the researchers were able to create a map of its internal
electrical components and pinpoint the location at which the circuit was
disconnected, as well as a mis-drilled hole, without breaking through the
encapsulating layer.
"This tactile technology opens up a non-optical way for the nondestructive testing of the human body and flexible electronics," says Luo. "Next, we want to develop the bionic finger's capacity for omnidirectional detection with different surface materials."
by Cell Press
No comments:
Post a Comment