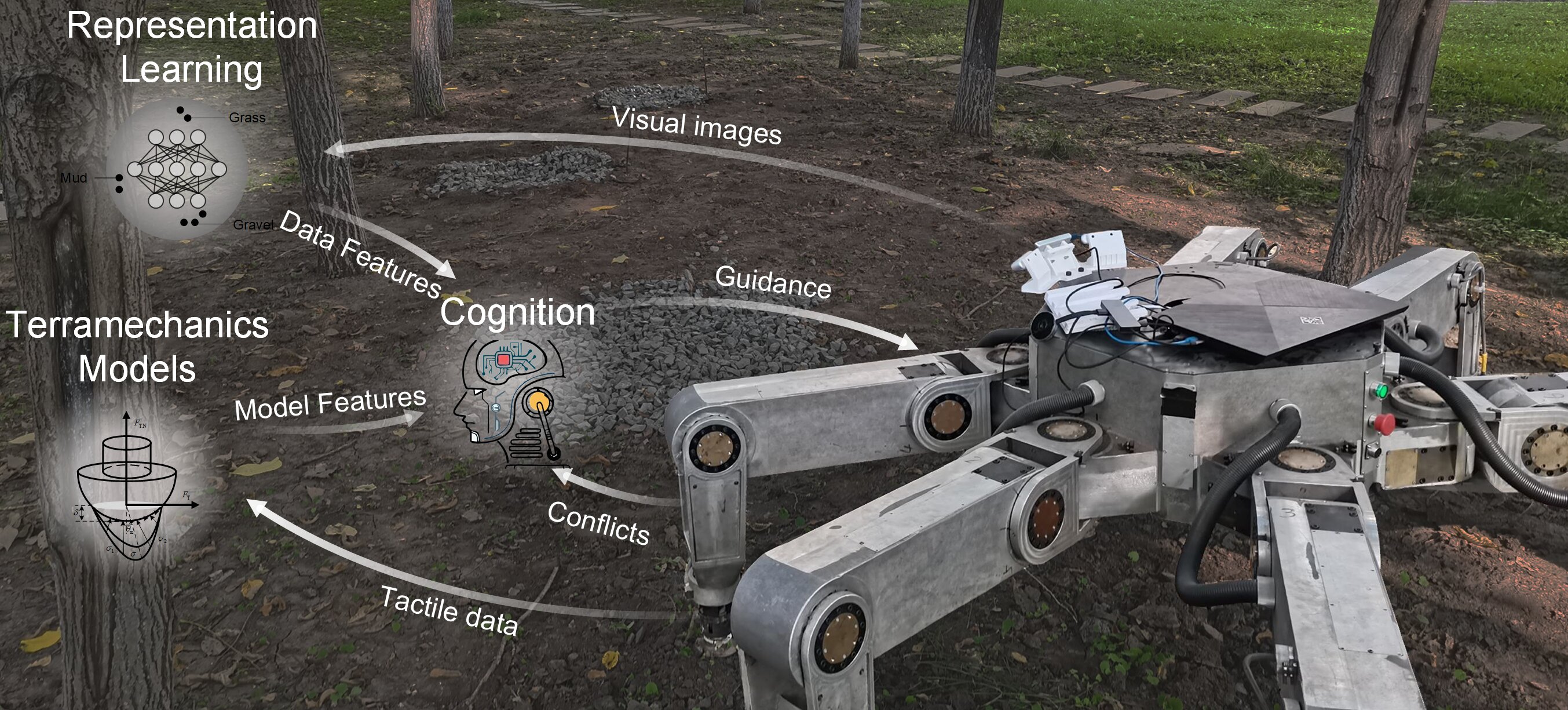
The workflow of learning method. Credit:
Science China Press
When
a kitten is walking in a dangerous environment, it will gently step on the
terrain with its feet to estimate the friction or bearing capacity. Based on
this experience, the kitten can then predict the physical parameters of terrain
with a similar appearance and avoid the soft, wet ground.
However, it is not easy for robots to
achieve such behavior because of the many challenges involved. For example, how
to extract effective features to characterize a dynamically changing environment? How to generalize the robot's experience of
interacting with the environment? How to resolve cognitive conflicts caused by
dynamically changing environments?
A recent cover paper in the National Science Review, "Learning
physical characteristics like animals for legged robots," presents a
possible solution. The paper was led by Ding Liang's team at Harbin Institute
of Technology, with Ph.D. student Xu Peng and Professor Ding Liang as co-first
authors.
The research team proposes an unsupervised learning framework for legged robots to learn physical characteristics of the terrain. Based on normal/tangential foot-terrain contact models, the unsupervised model-data-based learning framework is designed to achieve incremental online visual-tactile fusion perception with cognitive conflict-solving capabilities. This is the first online, incremental, and cognitive conflict-solving report that enables a robot to learn the physical characteristics of the environment independently and autonomously, endowing the robot with physical artificial intelligence.
Credit: Science China Press
Finally, the work conducts both indoor and outdoor hardware experiments, and the experimental results demonstrate that the proposed approach can effectively help robots to accurately perceive and predict the physical features of the environment, while learning and adjusting their cognitive models. Finally, the robot successfully and safely performs navigation tasks in complex environments.
Source: Legged robots learn dynamic physical characteristics of terrains like animals (techxplore.com)
No comments:
Post a Comment